机器视觉系统是通过机器视觉产品将被摄取目标转换成图像信号,传送给的图像处理系统,移动搬运视觉AI协作机器人尺寸,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作,移动搬运视觉AI协作机器人尺寸。机器视觉是一项综合技术,包括图像处理、机械工程技术,移动搬运视觉AI协作机器人尺寸、控制、电光源照明、光学成像、传感器、模拟与数字视频技术、计算机软硬件技术(图像增强和分析算法、图像卡、I/O卡等)。一个典型的机器视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。 达明机器人(上海)有限公司为您提供AI协作机器人。移动搬运视觉AI协作机器人尺寸

基于颜色特征的物体识别系统对于不同颜色的分别提取和识别随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在生产生活中,视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。视觉系统是一个非常复杂的系统,它既要做到图像的准确采集还要做到对外界变化反应的实时性,同时还需要对外界运动的目标进行实时跟踪。因此,视觉系统对硬件和软件系统都提出了较高的要求。目前比较流行的足球机器人技术,它的视觉系统属于比较典型的快速识别和反应类型。 涂胶视觉AI协作机器人加工达明机器人(上海)有限公司致力于提供AI协作机器人,欢迎您的来电哦!
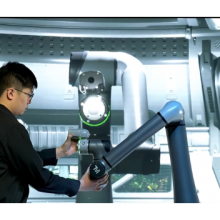
在许多公司中,那些难度高、人力无法胜任或单调重复的任务都交给了机器人来处理。机器人可以实现始终一致的质量和可靠性,并且通常工作速度比人更快。但是,机器人的应用范围有限,因为它们只能在受限的运动范围内执行特定的任务。而计算机视觉技术可以让机器人变得“更智能”,并有助于扩大其应用领域。现代机器人可适用于许多领域和各类丰富的应用。但是,尤其是当机器人需要直接与人合作时,如果机器人不具备“视觉能力”,它们的表现很快就会达到极限。如果没有视觉系统的协助,通常无法实现更智能、更复杂的应用,因为这些应用需要在多变的环境条件下可靠地运作。
图像检测此类目属于标准的视觉检测项目,在日常生产中,我们需要对产品进行检测,以此***产品的合格率,在视觉技术还未介入时,生产线大多采取人工的方式进行检测,但是这种检测模式受到人为主观因素影响,因此效率比较低。而通过机器视觉采集图像的方式进行对比分析,我们可以快速的得出结果,并且结果具有客观性,同时检测速度快,可长时间工作,目前我们经常遇见的案例有:硬币字符检测、电路板检测、饮料瓶盖的生产是否合格、产品的条码字符的检测识别,玻璃瓶的缺陷检测、以及药用玻璃瓶检测等等。 达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,期待您的光临!
虽然很多机器人具备一定程度的智能化,但还远未达到人类所需的智能化程度,一个重要原因是机器人视觉感知系统中还有许多科学问题、关键应用技术问题等,仍亟待解决。如:1)如何使机器人像人那样,对客观世界的三维场景进行感知、识别和理解;2)哪些三维视觉感知原理可以对场景目标进行快速和高精度的三维测量,并且基于该原理的三维视觉传感器具有小体积、低成本,方便嵌入到机器人系统中;3)基于三维视觉系统获得的三维场景目标信息,如何有效地自组织自身的识别算法,准确、实时地识别出目标;4)如何通过视觉感知和自学习算法,使机器人像人那样具有自主适应环境的能力,自动地完成人类赋予的任务等。 达明机器人(上海)有限公司为您提供AI协作机器人,欢迎您的来电!珠海涂胶视觉AI协作机器人编程
AI协作机器人,就选达明机器人(上海)有限公司,让您满意,欢迎您的来电!移动搬运视觉AI协作机器人尺寸
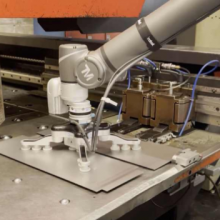
3D机器视觉技术作为人工智能关键底层技术之一,凭借真实三维环境感知和目标定位识别能力,为各类机器人开启“慧眼”,实现了在工业、农业、、科学研究、交通运输、商业、医疗、服务和家庭等众多领域的产品化,应用边界与规模持续扩大。随着应用场景日益复杂和智能化程度加速跃升,机器人对视觉感知模块的需求从“看清世界”向“看懂世界,智能交互”进化。以典型的移动机器人为例,3D视觉感知应用可以简单概括为:应用场景:电商零售、物流分拣中心、制造业厂内物流、商业、家庭等机器人类型:AGV/AMR/无人叉车、复合移动机器人(充电/服务/家庭等)工作内容:物料搬运(AGV/AMR/无人叉车视觉感知/托盘识别)、目标检测及运动引导(充电/巡检/看护/服务等)视觉需求:快速、精细、稳定的真实环境感知及目标物体检测识别,不受环境光(室内外、暗光强光、反射、吸收等)、机械振动、运动模糊、信号干扰等影响。 移动搬运视觉AI协作机器人尺寸
达明机器人(上海)有限公司 手机: 电话: 地址:上海 上海 松江区 上海市松江区九亭镇中心路1158号6幢402室-1